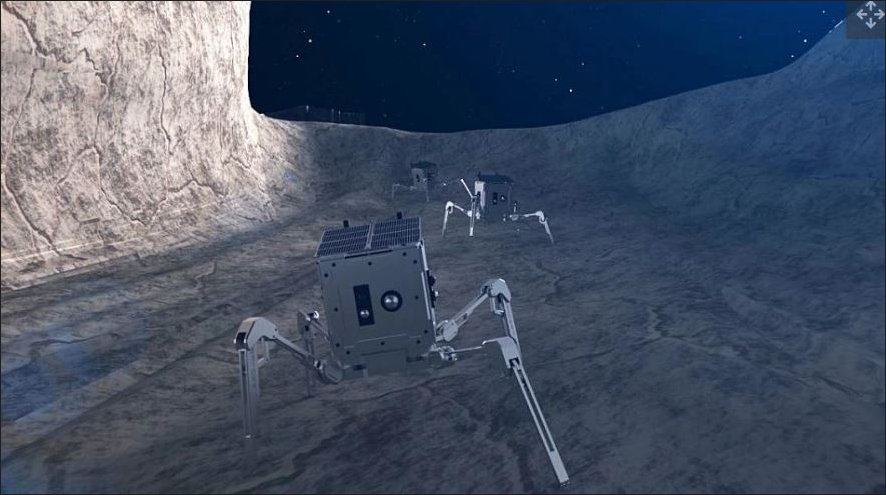
The Moon is dotted with steep-walled holes known as pits, or skylights, which likely lead to sub-surface lava tubes that could serve as sheltered underground environments for human settlers. Engineers are developing specialized robots to explore these hard-to-access topographical features.
The trick is designing these vehicles to be compatible with small landers, making them capable of negotiating steep pit aprons, and equipping them to acquire cross-pit images. A team led by William “Red” Whittaker, a robotics professor at Carnegie Mellon University, has developed the PitRanger, a 33-pound mini-robot outfitted with a solar panel and an adjustable telephoto camera and tested it in a massive sinkhole in Utah.
Whittaker explains his challenge to Space.com:
“The scenario is to rove to a pit with a micro-rover, peer into the pit, acquire images of walls, floors, caverns, and then generate pit models,” Autonomy for fast exploration is the critical technology since the small, solar-powered rovers won’t be able to carry direct-to-Earth radio for supervision or guidance.
In addition, “the rover must succeed in a single illumination period” on the moon, because it needs the sun for energy and heating. (A lunar day lasts about 14 Earth days, and the lunar night is equally long.) “It only has 12 days, not 12 years, to complete its mission.”
The rover would circumnavigate the rim, identify the overlooks offering the required, and deploy a tiltable camera to obtain the required angles needed to create a high-fidelity, 3D-quality image, The result will be far superior to anything that a Moon-circling satellite could capture.
Not only do pits provide potential habitats, they are windows into lunar geology. Scientists expect to gain insights into volcanology, morphology and much more, Wittaker said.
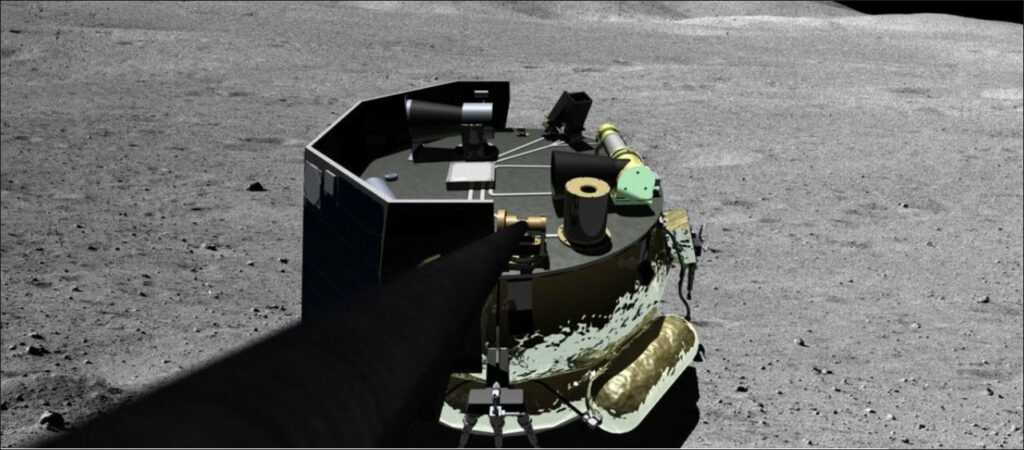
 Harkening back to the success of cubesats, small, standardized satellites, NASA will launch a small rover. Iris, that it hopes will also be inexpensive to produce.
Harkening back to the success of cubesats, small, standardized satellites, NASA will launch a small rover. Iris, that it hopes will also be inexpensive to produce.